


In 3D scene generation, a captivating challenge is the seamless integration of new objects into pre-existing 3D scenes. The ability to modify these complex digital environments is crucial, especially when aiming to enhance them with human-like creativity and intention. While adept at altering scene styles and appearances, earlier methods falter in inserting new objects consistently across various viewpoints, especially when precise spatial guidance is lacking.
Researchers have introduced ETH Zurich and Google Zurich InseRF, groundbreaking techniques developed to address this challenge. InseRF innovatively uses a combination of textual descriptions and a single-view 2D bounding box to facilitate the insertion of objects into neural radiance field (NeRF) reconstructions of 3D scenes. This method significantly deviates from previous approaches, predominantly characterized by their limitations in achieving multi-view consistency or constrained by the need for detailed spatial information.
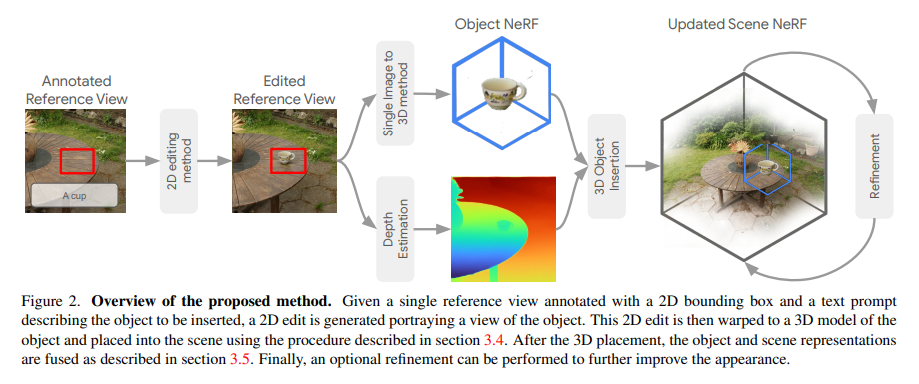
The core of InseRF’s methodology is a meticulous five-step process. The journey begins with creating a 2D view of the target object in a chosen reference view of the scene. This step is guided by a text prompt and a 2D bounding box, which collectively inform the spatial placement and appearance of the object. Using sophisticated single-view object reconstruction techniques, the object is lifted from its 2D representation into the 3D realm. These techniques are informed by large-scale 3D shape datasets, thus embedding strong priors over the geometry and appearance of 3D objects.
InseRF harnesses the power of monocular depth estimation methods to estimate the depth and position of the object relative to the camera in the reference view. An intricate process of scale and distance optimization is then undertaken to ensure that the object’s placement in 3D space accurately reflects its intended size and location per the reference view.
The scene and object NeRFs are meticulously fused to create a unified scene, now enriched with the newly inserted object. This fusion is achieved by transforming rays to the scene and object coordinate systems and applying each NeRF representation to the corresponding transformed rays. An optional but crucial refinement step further enhances the scene, improving details such as lighting and texture of the inserted object.

InseRF’s performance across various 3D scenes proves its superiority over existing methodologies. The key highlights of its performance include:
- The ability to insert objects that maintain consistency across multiple views is a feat unattainable by prior methods.
- Inserting objects into a scene has been simplified, as objects can now be placed without explicit 3D spatial guidance.
- A refinement step that significantly enhances the scene’s realism, particularly in the lighting and texture details of the inserted objects.
In conclusion, InseRF is an innovative approach to object insertion that solves the longstanding challenge of multi-view consistency and opens up new avenues for creativity in 3D scene design. By requiring minimal spatial information for object placement, InseRF democratizes the process of 3D scene enhancement, making it accessible and feasible for a broader range of applications. The implications of this technology are profound, paving the way for more dynamic, interactive, and realistic 3D environments in various fields, from virtual reality to digital art creation.
Check out the Paper and Project. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter. Join our 36k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and LinkedIn Group.
If you like our work, you will love our newsletter..
Don’t Forget to join our Telegram Channel
The post Researchers from ETH Zurich and Google Introduce InseRF: A Novel AI Method for Generative Object Insertion in the NeRF Reconstructions of 3D Scenes appeared first on MarkTechPost.
#AIShorts #Applications #ArtificialIntelligence #ComputerVision #EditorsPick #Staff #TechNews #Technology #Uncategorized [Source: AI Techpark]