


When a whirring sound catches your attention, you’re walking down the bustling city street, carefully cradling your morning coffee. Suddenly, a knee-high delivery robot zips past you on the crowded sidewalk. With remarkable dexterity, it smoothly avoids colliding into pedestrians, strollers, and obstructions, deftly plotting a clear path forward. This isn’t some sci-fi scene – it’s the cutting-edge technology of GeFF flexing its capabilities right before your eyes.

So what exactly is this GeFF, you wonder? It stands for Generalizable Neural Feature Fields, representing a potential paradigm shift in how robots perceive and interact with their complex environments. Until now, even the most advanced robots have struggled to interpret and adapt to the endlessly varied real-world scenes reliably. But this novel GeFF approach may have finally cracked the code.
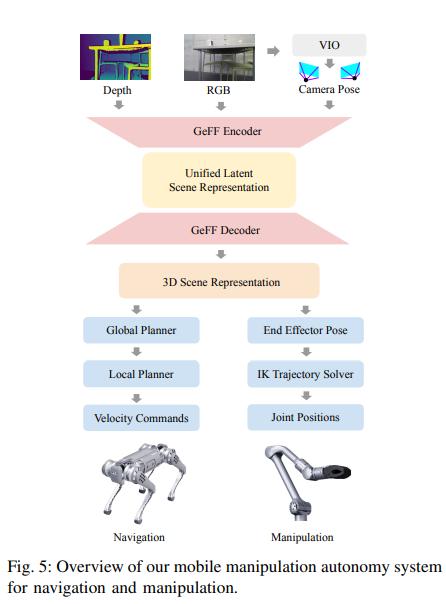
Here’s a simplified rundown of how GeFF works its magic. Traditionally, robots use sensors like cameras and lidar to capture raw data about their surroundings – detecting shapes, objects, distances, and other granular elements. GeFF takes a radically different tack. Utilizing neural networks, it analyzes the full, rich 3D scene captured by RGB-D cameras. It coherently encodes all of the geometrical and semantic meaning in one unified representation.
But GeFF isn’t merely building some super high-res 3D map of its environment. In an ingenious twist, it’s actually aligning that unified spatial representation with the natural language and descriptions that humans use to make sense of spaces and objects. So the robot develops a conceptual, intuitive understanding of what it’s perceiving – being able to contextualize a scene as “a cluttered living room with a couch, TV, side table, and a potted plant in the corner” just like you or I would.
The potential implications of this capability are truly mind-bending. By leveraging GeFF, robots can navigate unfamiliar, unmapped environments much more akin to how humans do – using rich visual and linguistic cues to reason, comprehend their surroundings, and dynamically plan unmapped paths to blazingly find their way. They can rapidly detect and avoid obstacles, identifying and deftly maneuvering around impediments like that cluster of pedestrians blocking the sidewalk up ahead. In perhaps the most remarkable application, robots powered by GeFF can even manipulate and make sense of objects they’ve never directly encountered or seen before in real-time.
This sci-fi futurism is already being realized today. GeFF is actively being deployed and tested on actual robotic systems operating in real-world environments like university labs, corporate offices, and even households. Researchers use it for various cutting-edge tasks – having robots avoid dynamic obstacles, locate and retrieve specific objects based on voice commands, perform intricate multilevel planning for navigation and manipulation, and more.
Naturally, this paradigm shift is still in its relative infancy, with immense room for growth and refinement. The systems’ performance must still be hardened for extreme conditions and edge cases. The underlying neural representations driving GeFF’s perception need further optimization. Integrating GeFF’s high-level planning with lower-level robotic control systems remains an intricate challenge.
But make no mistake – GeFF represents a bonafide breakthrough that could completely reshape the field of robotics as we know it. For the first time, we’re catching glimpses of robots that can deeply perceive, comprehend, and make fluid decisions about the rich spatial worlds around them in a gazellelike fashion – edging us tantalizingly closer to having robots that can truly operate autonomously and naturally alongside humans.
In conclusion, GeFF stands at the forefront of innovation in robotics, offering a powerful framework for scene-level perception and action. With its ability to generalize across scenes, leverage semantic knowledge, and operate in real-time, GeFF paves the way for a new era of autonomous robots capable of navigating and manipulating their surroundings with unprecedented sophistication and adaptability. As research in this field continues to evolve, GeFF is poised to play a pivotal role in shaping the future of robotics.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter. Join our Discord Channel and LinkedIn Group.
If you like our work, you will love our newsletter..
Don’t Forget to join our Telegram Channel and 38k+ ML SubReddit
The post GeFF: Revolutionizing Robot Perception and Action with Scene-Level Generalizable Neural Feature Fields appeared first on MarkTechPost.
#AIPaperSummary #AIShorts #Applications #ArtificialIntelligence #EditorsPick #Robotics #Staff #TechNews #Technology #Uncategorized [Source: AI Techpark]