


The relentless quest for autonomous vehicles has pivoted around the ability to interpret and navigate complex environments with precision and reliability. Central to this endeavor is the technological prowess in 3D scene reconstruction and novel view synthesis, where the sparse data from Light Detection and Ranging (LiDAR) systems play a pivotal role. Earlier approaches to leveraging this data have often encountered bottlenecks, particularly in handling the inherent sparsity and variability of outdoor environments. These challenges have underscored the need for innovative solutions that can transcend the limitations of existing methods.
Parent-Child Neural Radiance Fields (PC-NeRF) innovation by Beijing Institute of Technology researchers emerges as a groundbreaking solution to these challenges. PC-NeRF introduces a hierarchical spatial partitioning method that fundamentally redefines the approach to 3D scene reconstruction and novel view synthesis using sparse LiDAR frames. By dissecting the environment into a series of interconnected segments, ranging from overarching scenes to specific points, PC-NeRF demonstrates an unparalleled capacity to distill and utilize sparse LiDAR data efficiently.
At the core of PC-NeRF’s methodology is dividing the captured environment into parent and child segments, a strategy that meticulously optimizes scene representations at various levels. This hierarchical approach enhances the model’s ability to capture detailed and accurate representations and significantly boosts the efficiency of sparse data utilization. By allocating different roles to parent and child NeRFs, where the former encapsulates larger blocks of the environment, and the latter focuses on detailed segmentations within these blocks, PC-NeRF adeptly navigates the complexities of outdoor settings that have traditionally challenged conventional neural radiance fields (NeRF).
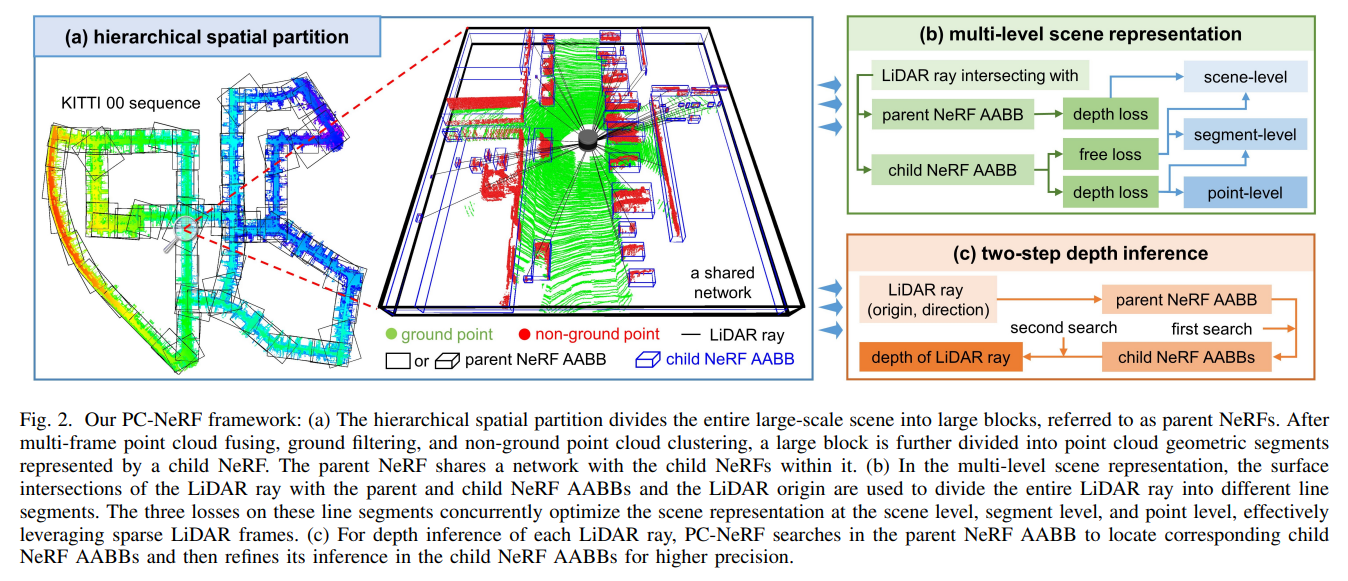
The implementation of PC-NeRF begins with partitioning the environment into parent NeRFs, which are then further divided into child NeRFs based on the spatial distribution of LiDAR points. This meticulous division allows for the detailed representation of the environment, enabling the rapid acquisition of a volumetric scene representation. Such a multi-level scene representation strategy is pivotal in enhancing the model’s ability to interpret and utilize sparse LiDAR data, setting PC-NeRF apart from its predecessors.
Through extensive experimental validation, PC-NeRF has demonstrated exceptional accuracy in novel LiDAR view synthesis and 3D reconstruction across large-scale scenes. Its ability to achieve high precision with minimal training epochs and to effectively handle situations with sparse LiDAR frames marks a significant advancement in the field. The framework’s deployment efficiency, particularly in autonomous driving, showcases its potential to improve navigation systems’ safety and reliability substantially.

PC-NeRF outshined traditional methods by showcasing its robustness against increased sparsity in LiDAR data, a scenario frequently encountered in real-world applications. The framework’s superiority was particularly evident in its application to large-scale outdoor environments, where it excelled in synthesizing novel views and reconstructing 3D models from limited LiDAR frames. Such achievements underscore the framework’s potential in advancing autonomous driving technologies and broadening the horizons for applying neural radiance fields in various domains.
In conclusion, introducing the PC-NeRF framework represents a paradigm shift in using sparse LiDAR data for 3D scene reconstruction and novel view synthesis. The hierarchical spatial partitioning approach of PC-NeRF enhances the detail and accuracy of 3D scene representations, enabling more efficient utilization of sparse LiDAR frames. The framework’s innovative methodology optimizes scene representations at multiple levels and significantly improves the quality of 3D reconstructions and novel view syntheses. PC-NeRF’s exemplary performance across various large-scale scenes demonstrates its potential to revolutionize autonomous driving technologies and beyond.
Check out the Paper and Github. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and Google News. Join our 37k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and LinkedIn Group.
If you like our work, you will love our newsletter..
Don’t Forget to join our Telegram Channel
The post Revolutionizing 3D Scene Reconstruction and View Synthesis with PC-NeRF: Bridging the Gap in Sparse LiDAR Data Utilization appeared first on MarkTechPost.
#AIShorts #Applications #ArtificialIntelligence #EditorsPick #MachineLearning #Staff #TechNews #Technology [Source: AI Techpark]