


Reinforcement learning (RL) focuses on how agents can learn to make decisions by interacting with their environment. These agents aim to maximize cumulative rewards over time by using trial and error. This field is particularly challenging due to the need for large amounts of data and the difficulty in handling sparse or absent rewards in real-world applications. RL applications range from game playing to robotic control, making it essential for researchers to develop efficient and scalable learning methods.
A major issue in RL is the data scarcity in embodied AI, where agents must interact with physical environments. This problem is exacerbated by the need for substantial reward-labeled data to train agents effectively. Consequently, developing methods that can enhance data efficiency and enable knowledge transfer across different tasks is crucial. Without efficient data usage, the learning process becomes slow and resource-intensive, limiting the practical deployment of RL in real-world scenarios.
Existing methods in RL often need help with data collection and utilization inefficiencies. Techniques such as Hindsight Experience Replay attempt to repurpose collected experiences to improve learning efficiency. However, these methods still need to be improved in requiring substantial human supervision and the inability to adapt autonomously to new tasks. These traditional approaches also often fail to leverage the full potential of past experiences, leading to redundant efforts and slower progress in learning new tasks.
Researchers from Imperial College London and Google DeepMind have introduced the Diffusion Augmented Agents (DAAG) framework to address these challenges. This framework integrates large language models, vision language models, and diffusion models to enhance sample efficiency and transfer learning. The research team developed this framework to operate autonomously, minimizing the need for human supervision. By combining these advanced models, DAAG aims to make RL more practical and effective for real-world applications, particularly in robotics and complex task environments.
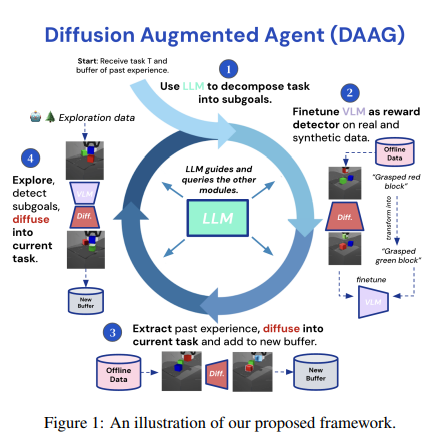
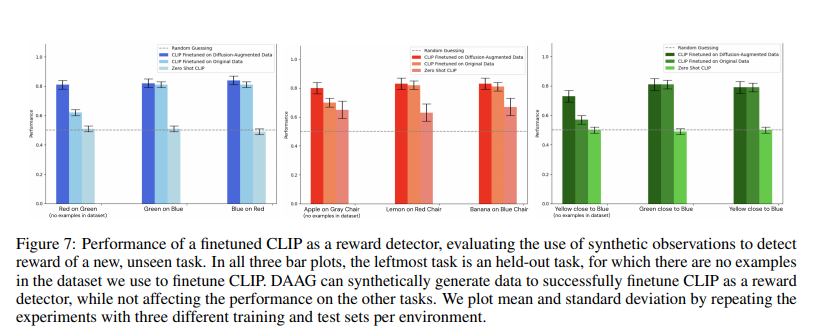
The DAAG framework utilizes a large language model to orchestrate the agent’s behavior and interactions with vision and diffusion models. The diffusion models transform the agent’s past experiences by modifying video data to align with new tasks. This process, called Hindsight Experience Augmentation, allows the agent to repurpose its experiences effectively, improving learning efficiency and enabling the agent to tackle new tasks more rapidly. The vision language model, CLIP, is fine-tuned using this augmented data, allowing it to act as a more accurate reward detector. The large language model breaks down tasks into manageable subgoals, guiding the diffusion model in creating relevant data modifications.
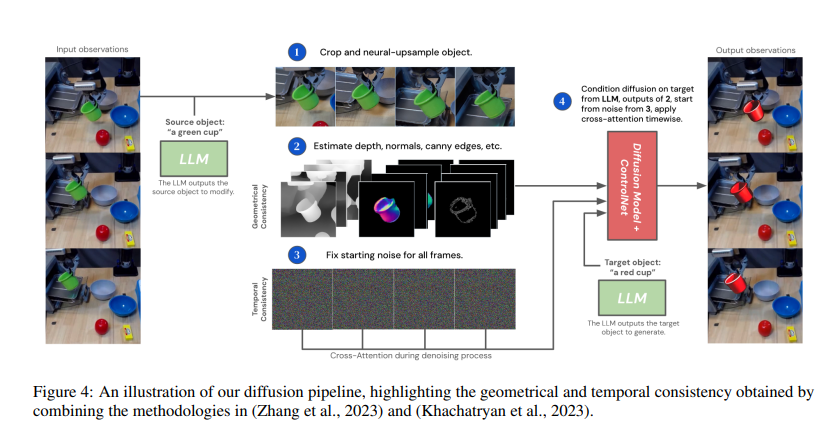
Regarding methodology, the DAAG framework operates through a finely tuned interplay between its components. The large language model is the central controller, guiding the vision language and diffusion models. When the agent receives a new task, the large language model decomposes it into subgoals. The vision language model, fine-tuned with augmented data, detects when these subgoals are achieved in the agent’s experiences. The diffusion model modifies past experiences to create new, relevant training data, ensuring temporal and geometric consistency in the modified video frames. This autonomous process significantly reduces human intervention, making learning more efficient and scalable.
The DAAG framework showed marked improvements in various metrics. In a robot manipulation environment, task success rates increased by 40%, reducing the number of reward-labeled data samples needed by 50%. DAAG cut the required training episodes by 30% for navigation tasks while maintaining high accuracy. Furthermore, in tasks involving stacking colored cubes, the framework achieved a 35% higher completion rate than traditional RL methods. These quantitative results demonstrate DAAG’s efficiency in enhancing learning performance and transferring knowledge across tasks, proving its effectiveness in diverse simulated environments.
In summary, the DAAG framework offers a promising solution to data scarcity and transfer learning challenges in RL. Leveraging advanced models and autonomous processes significantly enhances learning efficiency in embodied agents. The research conducted by Imperial College London and Google DeepMind marks a step forward in creating more capable and adaptable AI systems. Through the use of Hindsight Experience Augmentation and sophisticated model orchestration, DAAG represents a new direction in developing RL technologies. This advancement suggests that future RL applications could become more practical and widespread, ultimately leading to more intelligent and versatile AI agents.
Check out the Paper and Project. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. If you like our work, you will love our newsletter..
Don’t Forget to join our 47k+ ML SubReddit
Find Upcoming AI Webinars here
The post Google DeepMind Researchers Introduce Diffusion Augmented Agents: A Machine Learning Framework for Efficient Exploration and Transfer Learning appeared first on MarkTechPost.
#AIPaperSummary #AIShorts #Applications #ArtificialIntelligence #EditorsPick #MachineLearning #Staff #TechNews #Technology [Source: AI Techpark]